
我们已经看到机器人可以完成行走、跑步及后空翻等动作,但现在一个学生团队正在研究一个能像跳羚一样跳跃的机器人原型。由苏黎世联邦理工学院和苏黎世应用科技大学设计和建造的SpaceBok正在荷兰ESA的ESTEC技术中心进行测试,旨在最终使受控跳跃的机器人在月球上更好地完成任务。

月球引力只有地球的六分之一。当阿波罗11号任务降落在月球上时,给予尼尔?阿姆斯特朗和巴兹?奥尔德林的任务之一就是练习如何在在月球上移动。虽然两名宇航员都已经在模拟月球重力下训练,但是真实的东西是无法替代的,所以作为有史以来第一次月球漫步的两个半小时的一部分,这两个人花了相当多的时间。

根据瑞士团队的说法,SpaceBok可以在月球上垂直跳到2米(6.6英尺),这意味着它可以以惊人的速度移动 - 有点像跳羚。然而,SpaceBok能够通过改变步态来适应不同的地形,因为它现在基本上是一个微小弹道上的微小航天器。它现在处于动态行走的领域。

项目负责人 Hendrik Kolvenbach说:“与任何时候至少有三条腿保持在地面上的静态行走不同,动态行走允许完全飞行阶段的步态,在此期间所有腿都离开地面。动物利用动态步态提供效率,但直到最近,控制所需的计算能力和算法使得在机器人上实现它们具有挑战性。对于月球、火星或小行星等低重力环境,跳离地面这样的事情就变成了一种非常有效的方式。“
SpaceBok使用带有弹簧的腿,作为能量存储单元来吸收每次着陆的冲击力,然后重新使用力量进行下一次跳跃。此外,它配备了一个跳羚没有的东西 - 一个反应轮,允许自己像卫星一样定向自己。
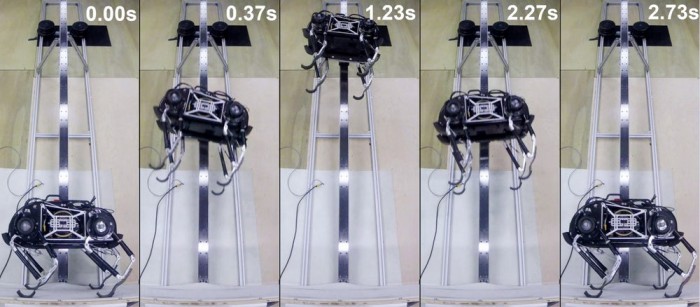
到目前为止,该团队已经设法让SpaceBok在模拟月球引力下重复跳跃到高达4.3英尺(1.3米)的高度。他们还建立了模拟小行星极低重力的测试设施,机器人将在飞行中花费更多的时间。
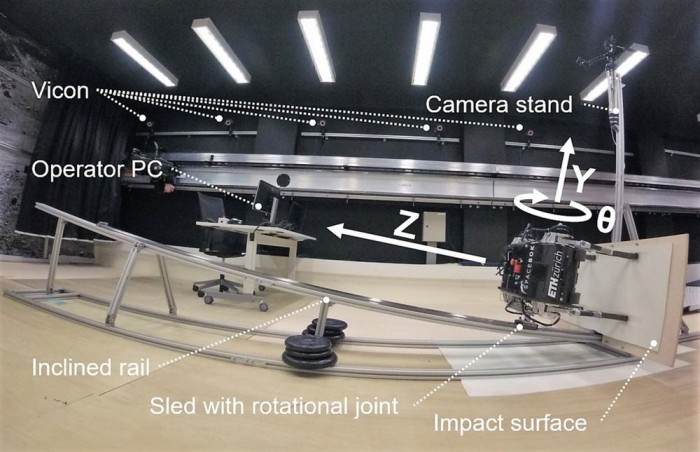
为此,他们在ESA的轨道机器人和导航和控制实验室使用了轨道机器人集成技术工作台(ORBIT)。它被描述为荷兰最平坦的地板,它的环氧树脂表面尺寸为15.7?29.5英尺(4.8?9米)。该团队将SpaceBok安装在自由浮动平台的侧面,因此它可以从一个面跳到另一个面。当它“漂浮”过来时,它使用它的反作用轮转动,因此它总是“向上”。
“测试进展得非常好,我们甚至使用SpaceBok来玩经典视频游戏《Pong》的真人游戏,”Kolvenbach说道。
之后的测试将把SpaceBok放置在包括障碍物、丘陵地形和真实土壤的环境中,然后进行户外测试。
